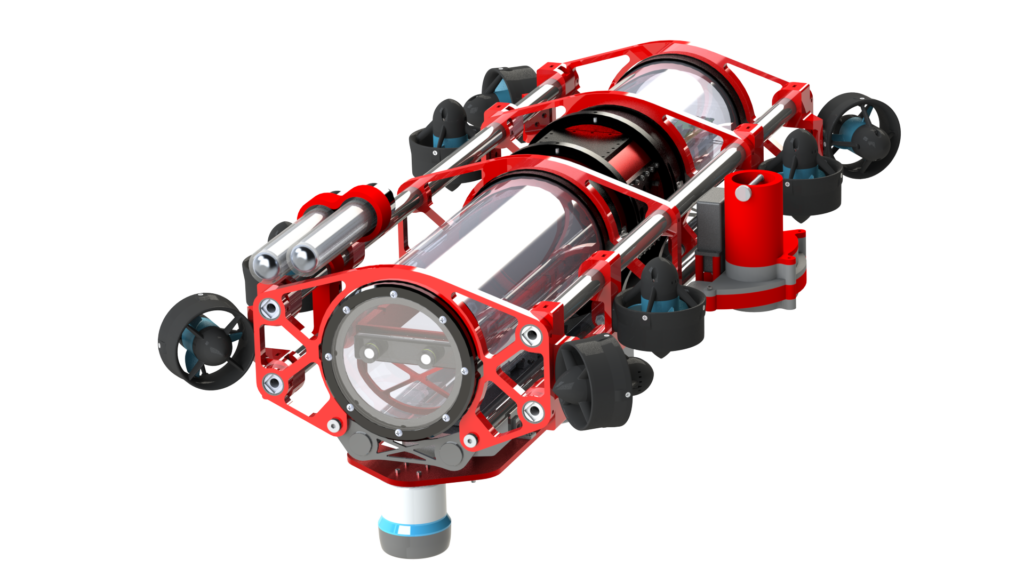
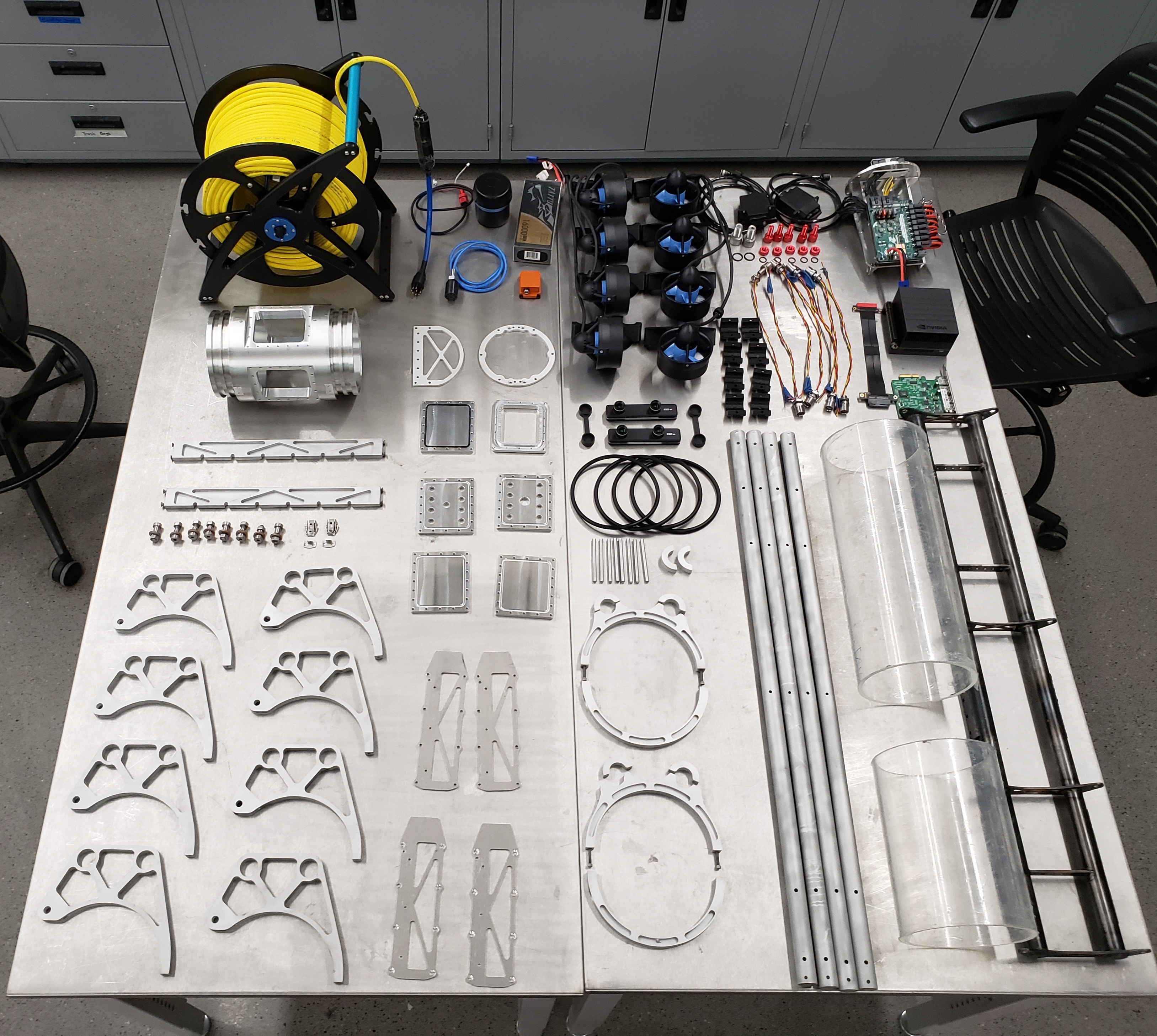
I am the Co-Founder and President of Tartan AUV: Carnegie Mellon University’s competitive RoboSub team. Each year we design and build an autonomous underwater vehicle (AUV) to compete autonomously in a variety of underwater tasks. We’ve raised over $40k in cumulative funding so far, and placed 5th overall in the 2020 season – our second year competing.
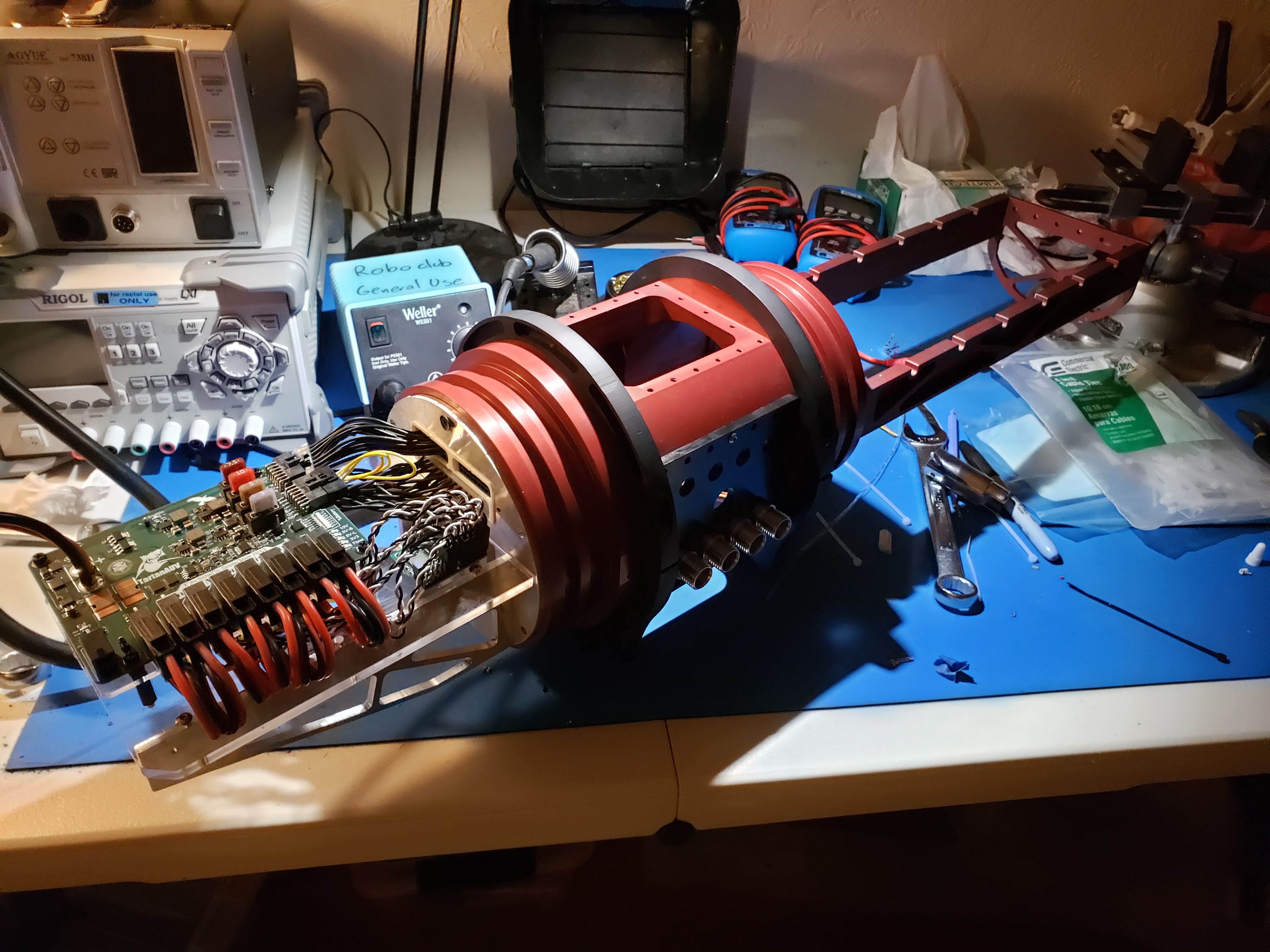
In addition to leadership responsibilities, I am responsible for the vehicle electronics, software architecture, and Guidance/Navigation/Control (GNC) system. The team has about 6 core members, 3 mechanical, 2 software, and 1 logistics.
Check out tartanauv.com for up-to-date information and official team information!