Project with Alvin Shek.
Check out our slides here: https://docs.google.com/presentation/d/1c7nvPH4lnh2w3DKnrLayHfO5ZFBT8kSY3hoLUGLD9bQ/edit?usp=sharing
Download our pdf final paper here:
Drone_control_16899_final_paper
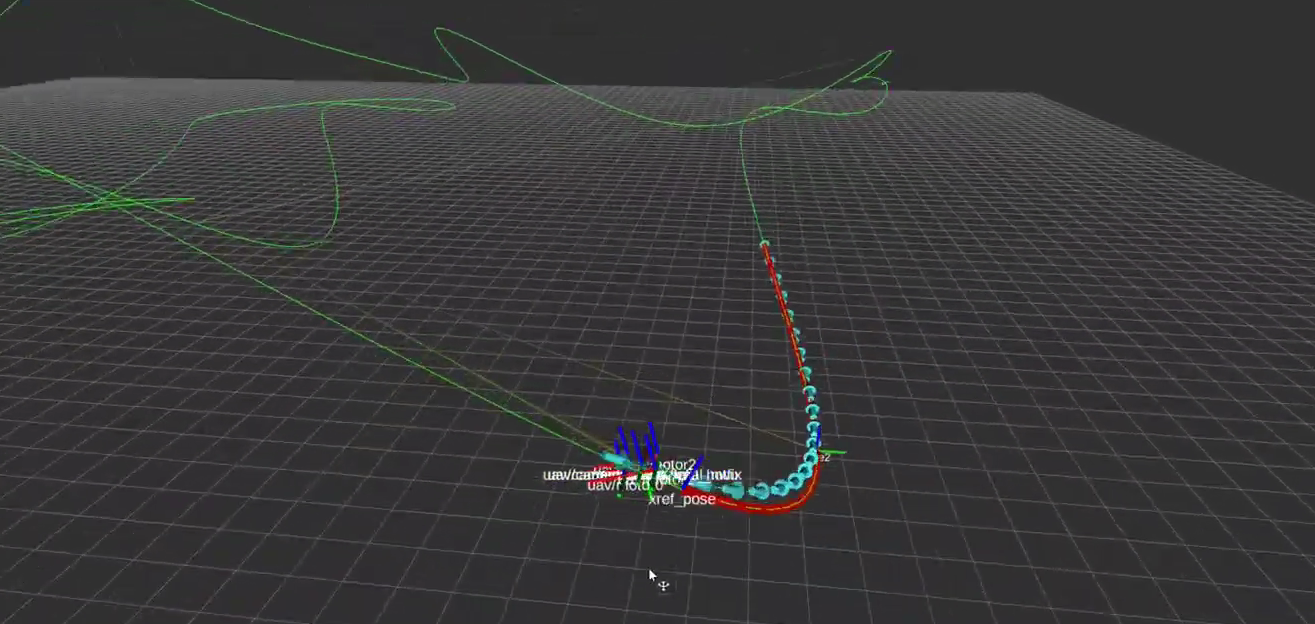
I worked with Alvin Shek to develop a trajectory generator, controller, and software stack to control a simulated agile racing quadcopter in order to race through a set of virtual drone racing gates. We implemented a minimum snap trajectory solver with specialized constraints for drone racing gates, a model predictive controller (MPC), and low level controllers in order to follow the trajectory. All software was written in python for ROS and is publicly available on my github repository here: https://github.com/Toms42/drone_controls
Video:
[youtube https://www.youtube.com/watch?v=uN9TzCkSSKk&w=560&h=315]