Project with Kirman Hansen. Pipe Dreams uses audio/video transmitters embedded into organic ductwork forms to provide glimpses of spatially disconnected…

Project with Kirman Hansen. Pipe Dreams uses audio/video transmitters embedded into organic ductwork forms to provide glimpses of spatially disconnected…

“Thoughts of a Plant” explores the slowness and passivity of plant life by transducing plant biosignals into an evolving ethereal…
Technical: Tom Scherlis, Sam Zeloof. Design: Patricia Yu, Audio: Eli Wirth-Apley, Wearable: Juhi Dhanesha “You are invited to listen” is…

Nexum was a great little project I did with Juhi Dhanesha, Patricia Yu, and Sam Zeloof. I built the wooden…

Background “are you ok?” is a satirical implementation of a mental health support kiosk from the 70s. The inspiration…

Project with Juhi Dhanesha, Patricia Yu, and Sam Zeloof.

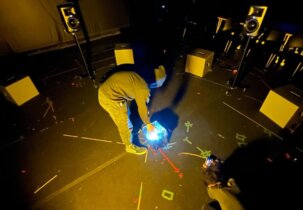
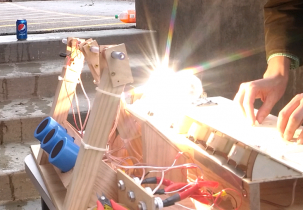
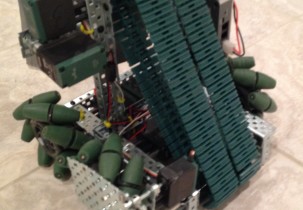
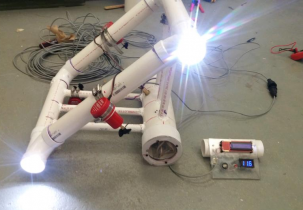
About Spotlight Spotlight (AKA: Disruption) was an art installation that explores the relationship between humans and their environment by means…
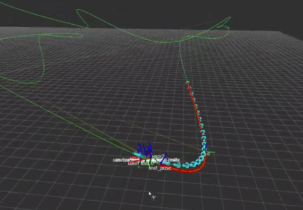
Project with Alvin Shek. Check out our slides here: https://docs.google.com/presentation/d/1c7nvPH4lnh2w3DKnrLayHfO5ZFBT8kSY3hoLUGLD9bQ/edit?usp=sharing Download our pdf final paper here: Drone_control_16899_final_paper I worked with…
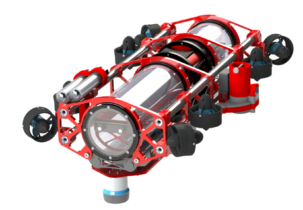
I am the Co-Founder and President of Tartan AUV: Carnegie Mellon University’s competitive RoboSub team. Each year we design and…
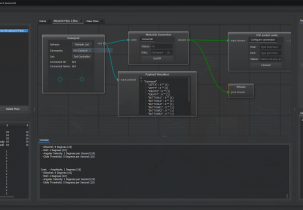
Monarch connect is a dataflow editor for creating modular command-and-control systems quickly. View on github: https://github.com/Toms42/Monarch-Connect Monarch allows users…

This page details my contributions to Carnegie Mellon’s effort to develop a low-cost, swarmable lunar-rover. Currently, the project has Phase…
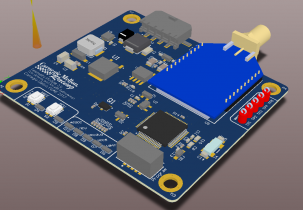
These modules were designed for Carnegie Mellon’s Formula SAE racecar, which is currently undefeated in the North America Electric Vehicle…

This was a project I built for CMU’s one-week hackathon Build18. We implemented quidditch in VR using a novel spring-based…
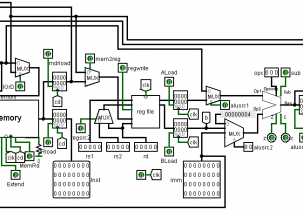
Github Link: https://github.com/Toms42/logisim-RISC-V-CPU Description: This is an emulated CPU based on the RISC-V architecture. It is emulated in the Logisim…
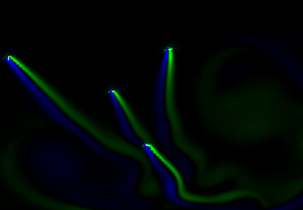
CUDA-Accelerated Lattice Boltzmann Simulator This is a fluid simulator I made with Henry Friedlander using the Lattice Boltzmann Method for…

Features: 150ft Ethernet Tether Over 35 pounds Live video and telemetry feed! Custom PCB and firmware Pitch and depth control…
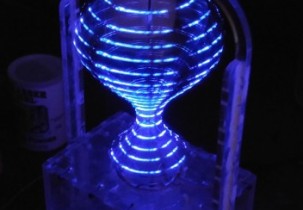
Info: This was made for my calculus teacher to demonstrate volumes of revolution, where a 2d function is rotated around…
Github Link Preview: Overview: I’ve just started this project, so not much to show yet. The goal is to brute…

Github Link Video: Pictures: Features: Custom speed VGA output: Uses a 12bit DAC (but only actually uses 3 colors…

I made a segway with some friends this year! It’s not totally done, but here is the report of its…
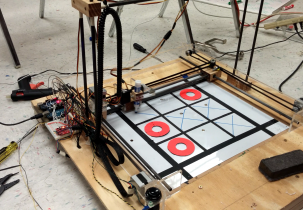
This page includes various projects that my students or I have made at Leap@CMU. Summer 2014: Air hockey robot: This…
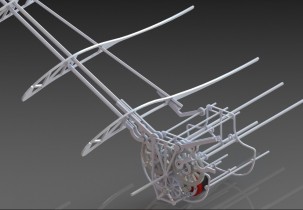
Status: design phase This is the avidrone, one of my favorite projects. I’ve been working on it since august, so…
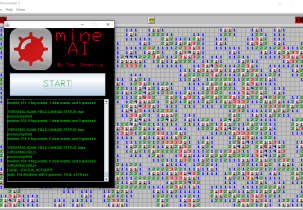
This is a java minesweeper ai, which can play the windows 10 variant of minesweeper: minesweeperX available here. Unfortunately, because…
Time: Winter 2015-2016 Status: Nearly Archived Completion Level: 90% Download PDF report here! Download PDF report here!
Status: Archived Time: 2013-2014 Winter Completion Level: Complete Description/Goal: This was a small (<30cmx30cmx30cm) robot designed to compete in the…
Status: Ongoing Time: 2015 October-November Completion Level: 80% Participants: Tom Scherlis, Haoran Fei, Chirag Kulkarni note!! This project has been…